Biography
I am a Senior Research Scientist and Lead with over a decade of experience at the frontier of Embodied AI and Spatial Intelligence. I am currently at the Robotics and AI Institute, architecting multimodal perception models to power next-generation, general-purpose robotic systems. Previously, as Research Lead for Spatial AI on the Atlas (humanoid) project at Boston Dynamics, I pioneered autonomous behaviors by integrating state-of-the-art perception into real-world control loops. My work focuses on the synthesis of semantic, geometric, and proprioceptive information, enabling general-purpose autonomy in unstructured environments. Throughout my career, I have consistently contributed to all aspects of the perception stack, from calibration and camera drivers to developing and maintaining cutting-edge machine learning models.
Previously, I was a research fellow in the Dyson Robotics Lab with Prof. Andrew Davison at Imperial College London. During my PhD, I worked under the supervision of Prof. Dr. Stefan Leutenegger on making real-time dense visual SLAM more robust through the fusion of inertial data and learned depth priors. I completed a bachelor’s degree in aerospace engineering from the University of Toronto, where my thesis project was supervised by Prof. Dr. Angela Schoellig.
Videos
Perception and Adaptability | Inside the Lab with Atlas
I was interviewed for this behind-the-scenes video at Boston Dynamics. It showcases the work our team had been up to for most of 2024 and the beginning of 2025, demonstrating how our machine learning and real-time perception systems enable Atlas to perform accurate and robust manipulation tasks in a factory-like environment.
Atlas Goes Hands On
A technical demonstration of the type of robot behaviors our team worked on at Boston Dynamics. After receiving an input list of bin locations, Atlas autonomously moves engine covers between supplier containers and a mobile sequencing dolly in the specified order. Atlas is using a learned vision model I designed to detect and localize the fixtures and individual bins in the environment.
HD Atlas Manipulates
This video highlights some of the very early object detection and localization work I was involved with on HD Atlas. Most of the techniques we were using at this stage were very basic, but taught us a lot about how to manipulate heavy and difficult-to-perceive objects.
Atlas Gets a Grip
The very first Boston Dynamics video I got to help make (I mostly worked on the object localization)! It was very stressful but also a lot of fun!
Publications
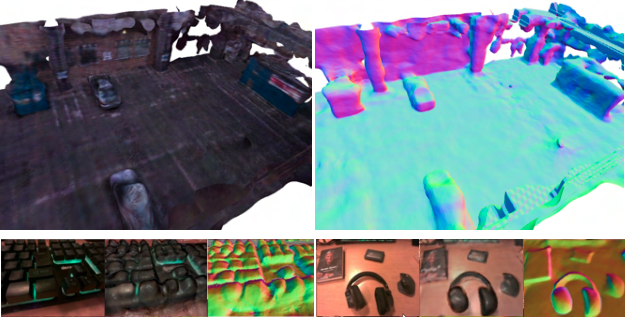
iMODE: Real-Time Incremental Monocular Dense Mapping Using Neural Field
ICRA 2023 (Best Navigation Paper Award Finalist)


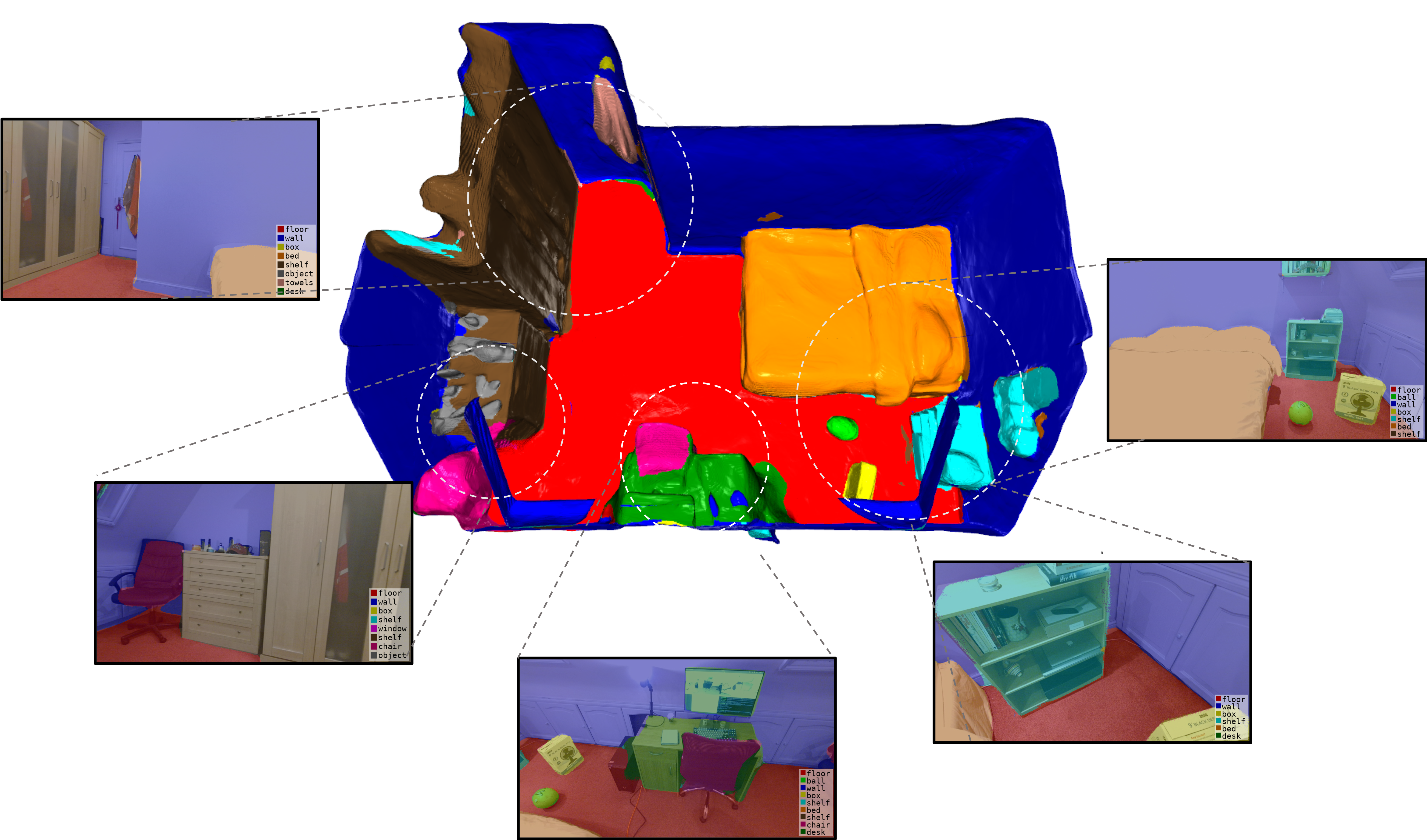
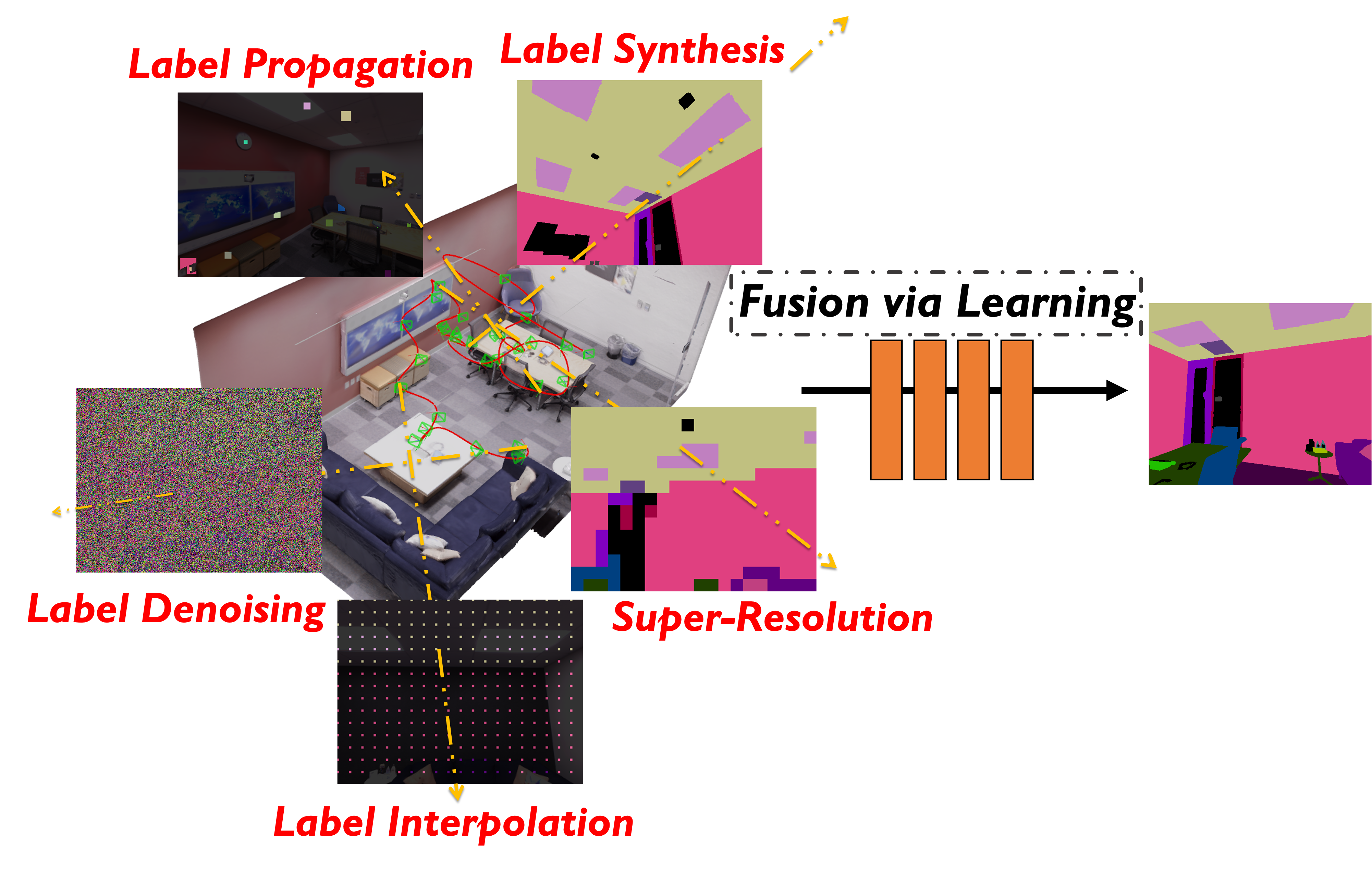
Towards the Probabilistic Fusion of Learned Priors into Standard Pipelines for 3D Reconstruction
ICRA 2020

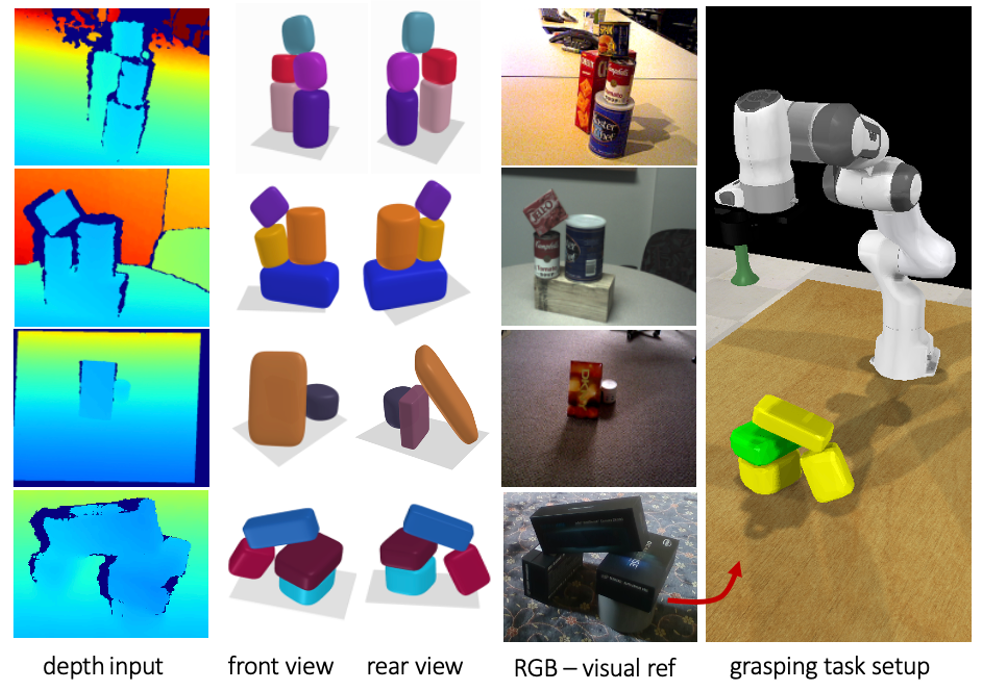
DeepFusion: Real-Time Dense 3D Reconstruction for Monocular SLAM using Single-View Depth and Gradient Predictions
ICRA 2019